
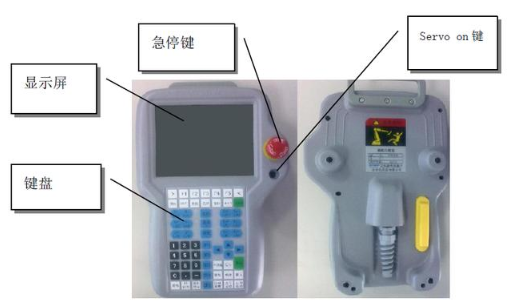
继上一阶段我们学习了《工业机器人编程》之后,本阶段我们来介绍《工业机器人操作基础》,因为现在工业机器人厂家众多,不能都一一介绍,本次主要以国产新松机器人(六
Read More..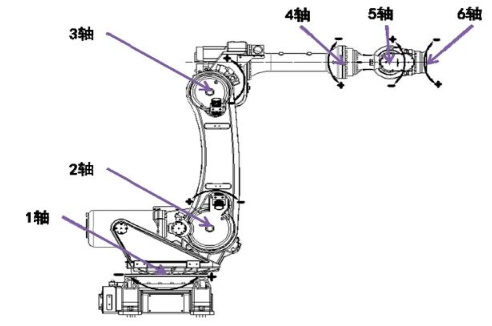
本次主要以国产新松机器人(六轴)作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》:一、工业机器人轴的定义1、工业机器人轴可以为旋转轴
Read More..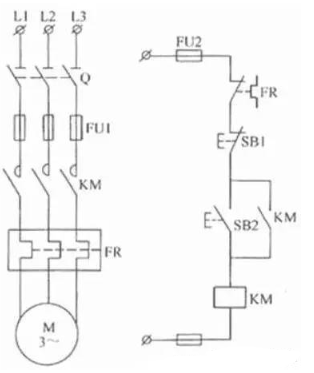
自锁与互锁作为电动机最基础的二次线保护方式,是每个电工都必须学会并且熟练运用的。本篇内容适合初学者或者对电工感兴趣的人。一般来说,学习电动机正反转可以更
Read More..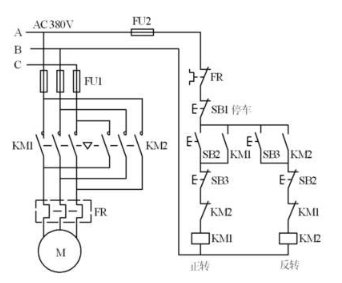
在图1是三相异步电动机正反转控制的电路和继电器控制电路图,图2与3是功能与它相同的PLC控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行
Read More..
干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外
Read More..
PLC可编程逻辑控制器,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输
Read More..
方向控制阀简称方向阀,主要用来通断油路或切换油流的方向,以满足对执行元件的启、停和运动方向的要求。按其用途可分为两大类:单向阀和换向阀。 (1)单向阀 单向阀
Read More..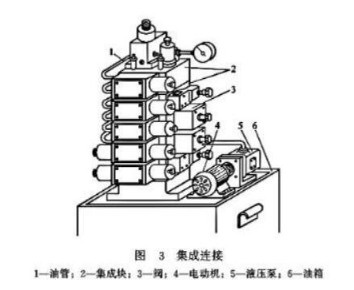
液压系统中常常会看到各种各样的液压阀,那么液压阀的连接方式有哪些呢? 硕辰液压厂家告诉你液压阀的连接方式有管式连接、板式连接、集成块式及叠加阀式等,下面就
Read More..
在非标自动化设备中常用的驱动方式有两种:气缸驱动和电机驱动。运动机构要是每次行走固定距离时,我们会选用气功驱动;运动机构每次行走的距离不固定或者多次行走或
Read More..
任何机械包括非标自动化设备的基本调试技巧都是横平、竖直、同心.首先不管调试任何一个产品,我们都要了解它的特性,和客 户的技术要求。下面我为大家介绍一些常见
Read More..